Radical Gravity
2021. In collaboration with Konuralp Senol, Kyungha Kwon
Developed with AA DRL Spyropoulos Studio
Global System that provides Self-Built Airdrop Robotic Shelter Swarms after Natural Disasters.
Design Research and Film



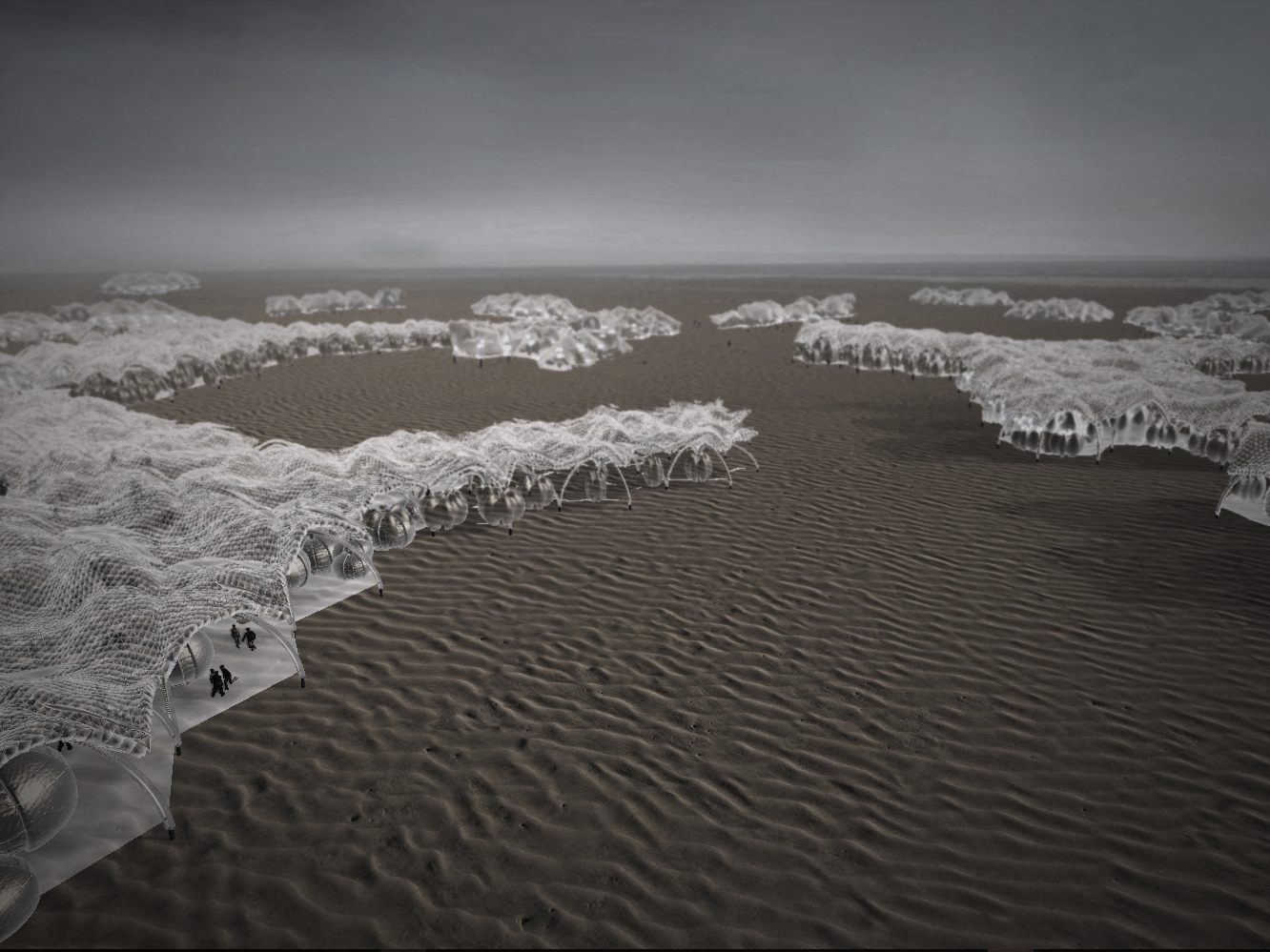

Natural disasters are an urgent problem on a global scale. Their number is increasing due to varied reasons – most prominently climate change – leaving millions of people without a home. Radical Gravity attempts to propose a system of robotic airdropped shelters that accommodates these people in shelters, while creating environment-friendly and sustainable shelter settlements with respect to human well-being.
Following natural disasters, land infrastructure is often compromised. We therefore propose using the high-altitude airdrop method for emergency shelters deployment. Instead of limiting the stage air dropping to the delivery of standard shelters, we consider this as a self-building or self-construction stage.
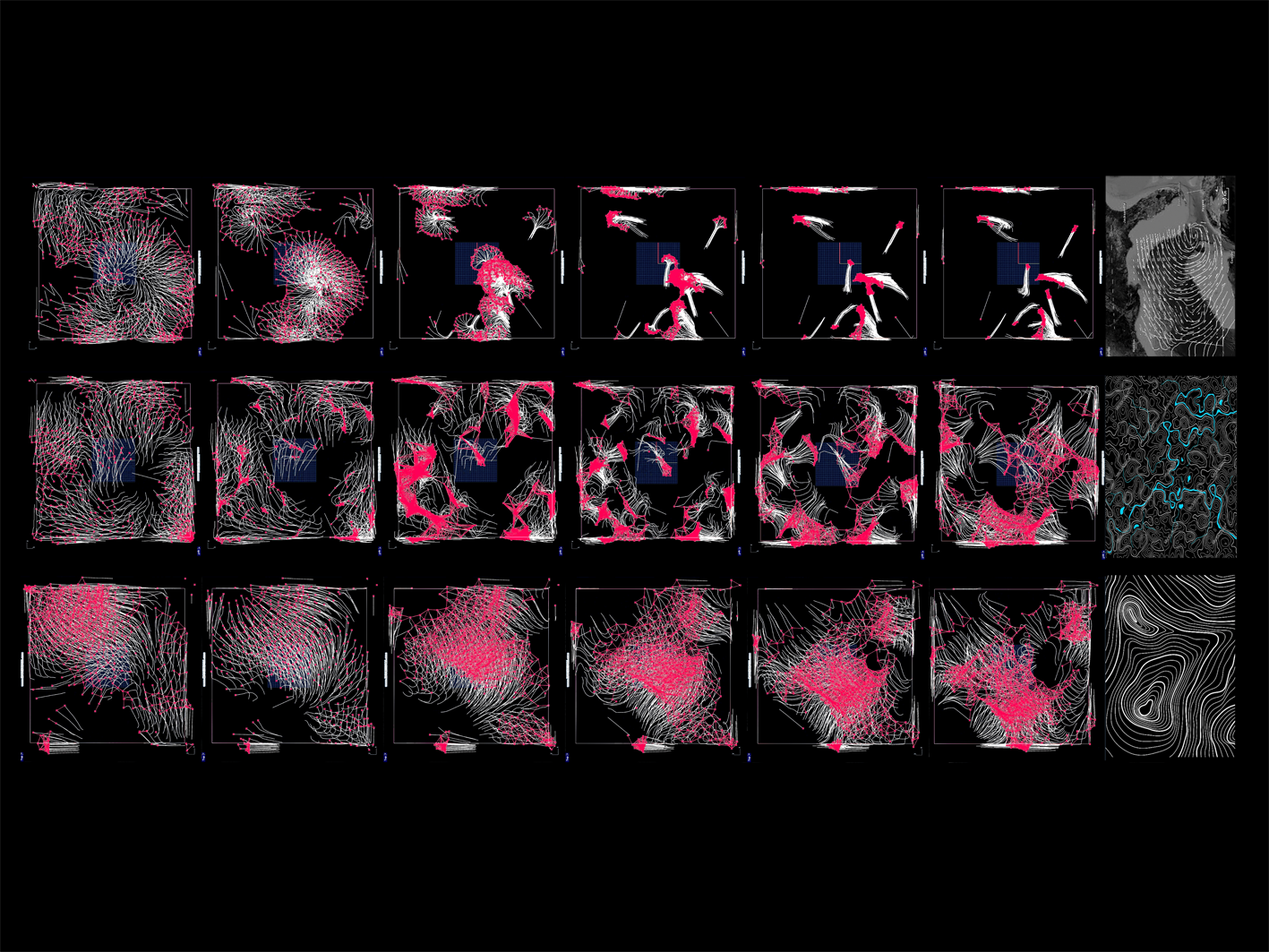
The research searches for more passive strategies of control, such as manoeuvring the flight using air resistance through changes in the drag distribution during the aggregation level. The aggregation flight results in new morphologies that differ depending on environmental and site-specific parameters.










Credits
Team: Angelina Kozhevnikova, Konuralp Senol, Kyungha Kwon
Studio: Theodore Spyropoulos
Founder: Patrik Schumacher
Tutors: Mostafa El-Sayed, Apostolos Despotidis
Special Thanks
Ghida El-Khayat, Aleksandar Bursac, AKT II
Amin Yassin, Daphne Drayiou, Panagiota Tsaparikou, Yuji Huang, Yunyu Huang, Salih Ege Savcı



Publications
Imagining the future: 2021's boldest design proposals by CNN
Design in an Age of Crisis: London Design Biennale responds to today’s crucial issues by Wallpaper*
6 ingenious designs for our 'age of crisis' by CNN
Five projects that reflect design in an age of crisis by DesignWeek
Design in an Age of Crisis Launches by Clatham House